EAI(Team Project)
A collaborative embodied AI task involving a quadruped robot for navigation and a humanoid robot for visual localization and grasping.
Jun 1, 2025

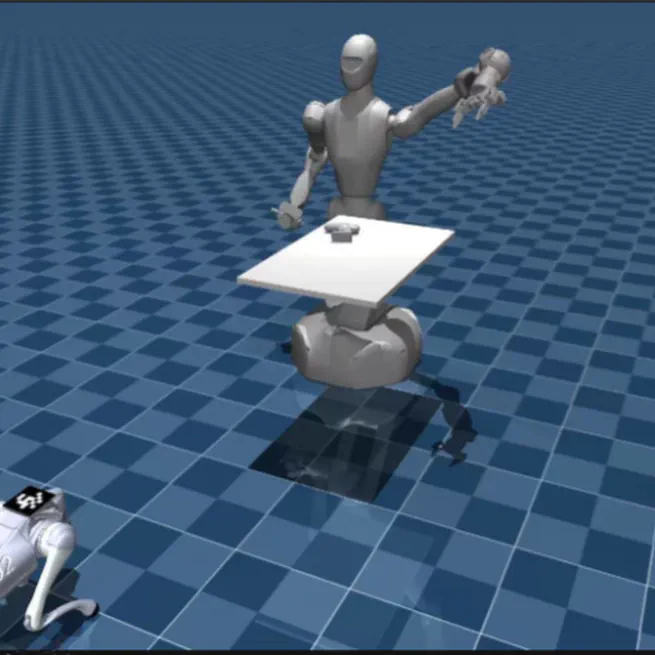
Pose Estimation & Grasping(Course Project)
Estimating 6-DoF object pose from point clouds and executing grasping in simulation using learned models and kinematic transformations.
Apr 25, 2025
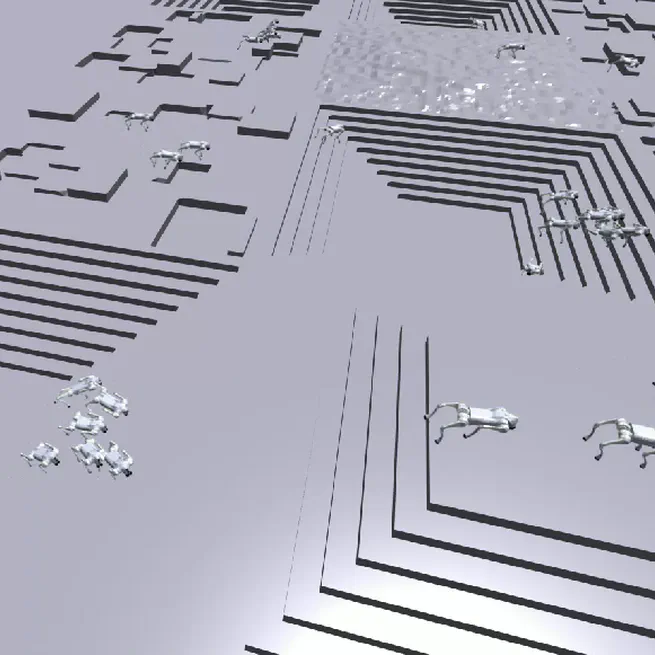
PPO Quadruped Locomotion
Trained a quadruped robot to traverse diverse terrains using PPO with curriculum learning. The agent learns to adapt its gait patterns (e.g. walking, trotting) based on terrain difficulty.Completed under the supervision of Jilong Wang, researcher at Galbot.
Jan 31, 2025