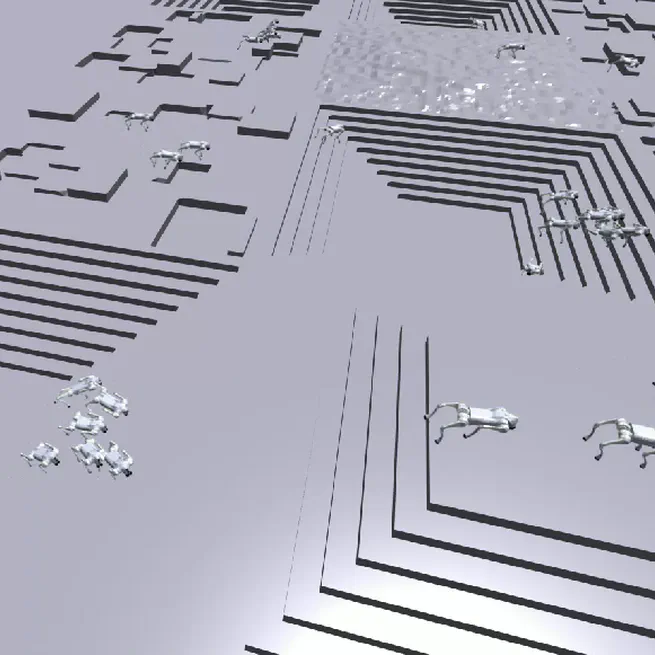
PPO Quadruped Locomotion
Trained a quadruped robot to traverse diverse terrains using PPO with curriculum learning. The agent learns to adapt its gait patterns (e.g. walking, trotting) based on terrain difficulty.Completed under the supervision of Jilong Wang, researcher at Galbot.
Jan 31, 2025